
Les interfaces cerveau-machine entre mythe et réalité
Que sait-on aujourd’hui du fonctionnement du cerveau ? Est-il possible de connecter le cerveau humain à des machines directement ? Quelles sont les applications médicales et non médicales de ces nouve..
Que sait-on aujourd’hui du fonctionnement du cerveau ? Est-il possible de connecter le cerveau humain à des machines directement ? Quelles sont les applications médicales et non médicales de ces nouvelles techniques ? Quelles sont les expériences récentes, invasives ou non, menées sur les animaux et sur les humains ? Comment les interfaces cerveau-machine vont-elles changer nos vies ?
L’interface cerveau-machine
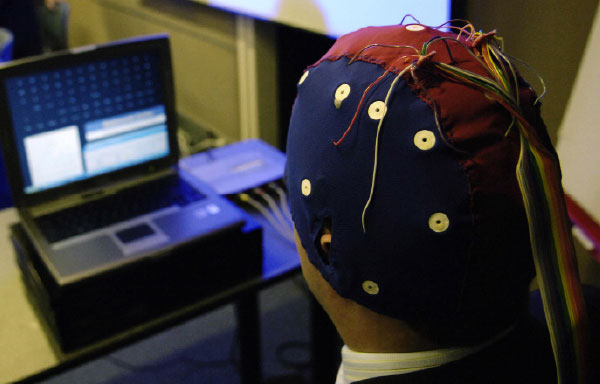
Une Interface cerveau-machine (ICM) désigne un système informatique-électronique de liaison directe entre un cerveau et une machine, permettant à un individu qui a une limitation des possibilités d’interaction avec son environnement d’effectuer des tâches sans passer par l’action des nerfs périphériques et des muscles (je pense, donc je fais).
Ce type de dispositif permet de contrôler par la pensée un ordinateur, une prothèse ou tout autre système automatisé sans solliciter ses bras, ses mains ou ses jambes. Le concept en lui-même remonte à 1973, et ce n’est que dans le milieu des années 1990 qu’ont eu lieu les premiers essais chez l’homme. D’ailleurs, j’ai eu l’honneur de visiter le laboratoire du Pr Jonathan R. Wolpaw aux Etats-Unis en 2014, qui est l’un des premiers professeurs de ce nouveau domaine scientifique.
Il est le premier à avoir rendu un handicapé (paralysie totale ou plégie) capable d’écrire sur un ordinateur en utilisant simplement son activité cérébrale et le concept de l’onde P300. Je travaille sur les interfaces cerveau-machine depuis 2006. Ce type d’interface peut s’avérer utile pour des patients atteints d’une maladie dégénérative (myopathie de Duchenne, sclérose latérale amyotrophique) ou une lésion haute de la moelle épinière, en leur permettant de retrouver une autonomie partielle et d’améliorer leur qualité de vie.
Certaines personnes atteintes par une maladie neurologique ne peuvent plus contrôler leurs muscles. Dans ce cas, seule l’utilisation de ce genre de système d’aide au handicap moteur utilisant l’interprétation de l’activité cérébrale du patient leur permet de communiquer et d’interagir avec leur environnement. Cette interface cerveau-machine peut être utile non seulement pour les personnes handicapées, mais aussi pour toutes les autres dans le but de contrôler un robot, voire un drone, dans des situations difficiles.
L’interface cerveau-machine ne peut pas déchiffrer pour le moment les sentiments (la colère, la douleur, etc.), ni littéralement interpréter l’activité mentale (bonjour, hello, etc.). Pour l’heure, le procédé ne peut pas savoir à quoi pense l’individu. Mais il existe de nombreuses recherches dans cette voie pour décoder les rêves, par exemple.
Certains scientifiques japonais ont réussi à décoder le contenu visuel de rêves pendant le sommeil. Les scientifiques modernes, en particulier les neuro-scientifiques, croient que les humains ne sont que des machines biologiques. Cela voudrait dire que l’être humain est un corps (machine) contrôlé par le cerveau (unité centrale ou un processeur) en envoyant des signaux électriques ou des hormones chimiques en boucle fermée.
Pour le moment, il existe trois caractéristiques pertinentes dans les signaux cérébraux qui peuvent être interprétés pour contrôler des machines (bras robotisé, fauteuil roulant) ou un ordinateur et pour communiquer avec l’environnement. Les deux premières caractéristiques sont les potentiels évoqués stables (SSVEP) et transitoires (P300). Le SSVEP est un signal qui apparaît au niveau du cortex occipital en réponse à une stimulation visuelle répétitive.
Et l’onde P300 est un potentiel évoqué lié à l’événement généré lors du processus de prise de décision. La lettre P signifie que c’est une onde d’amplitude positive, et 300 qu’elle apparaît 300 millisecondes (ms) après le début d’une stimulation. La dernière caractéristique est l’Imagerie motrice (Motor Imagery). Il s’agit des activités électriques cérébrales rythmiques (en utilisant des bandes de fréquences telles que : Alpha (8-13 Hz), Beta (13-30 Hz) et Gamma (> 30 Hz)) produits par l’imagination des mouvements brefs.
J’ai réalisé plusieurs travaux dans ce domaine et j’ai publié aussi plusieurs articles dans des revues scientifiques internationales. Par exemple, j’ai contrôlé un jeu vidéo avec la pensée (utilisant l’Electroencéphalographie (EEG)) et les mouvements oculaires en 2004 quand j’étais doctorant à Tokyo Institute of Technology, Japon. Et en 2016, on a contrôlé un bras de robot pour écrire le mot «Hi» utilisant Steady state visually evoked potentials (SSVEP) et Motor Imagery (MI) en coopération avec un groupe de recherche chinois.
Récemment, j’ai contrôlé un humanoïde qui ressemble à 100% à l’être humain (une copie du professeur Hiroshi Ishiguro, qui a fabriqué un androïde lui ressemblant et qui appartient à la famille appelée Geminoid) utilisant l’imagination motrice enregistrée par la technique Magnétoencéphalographie (MEG) où l’utilisateur était à Osaka et l’humanoïde était dans une autre ville : Kyoto, au Japon. Pour simplifier les choses, si on bouge ou si on imagine uniquement les mouvements bilatéraux des mains, alors le robot bouge ses mains en même temps, même si on n’est pas dans la même ville.
On est donc capable de communiquer avec ce Geminoïd uniquement par le cerveau via internet.
Une interface cerveau-machine est donc une combinaison de software et de hardware qui intègre six étapes fonctionnelles : la mesure de l’activité cérébrale, le prétraitement des signaux cérébraux, les extractions de caractéristiques (telles que P300, SSVEP, and MI), la classification, la commande de l’ordinateur et le retour perceptif (ou feed-back).
Il existe plusieurs applications pour les interfaces cerveau-machine, telles que les applications médicales cliniques pour contrôler un fauteuil roulant, la réhabilitation et la messagerie par voie cérébrale pour communiquer avec l’environnement. Quant aux applications non médicales potentielles, elles sont nombreuses aussi, y compris pour les personnes en bonne santé, avec par exemple le domaine des jeux vidéo et le domaine militaire.
L’avenir des interfaces cerveau-machine
Les interfaces cerveau-machine non invasives sont déjà sur les marchés internationaux, mais celles invasives le seront dans les années à venir en tant que dispositifs médicaux pour les personnes atteintes de paralysie, de paraplégie ou de tétraplégie. Allant toujours de l’avant, les scientifiques n’ont pas arrêté à ce stade de contrôle à distance de l’ordinateur et des membres artificiels en utilisant des signaux électriques ou des champs magnétiques du cerveau seulement, ils activent encore pour contrôler par un cerveau un autre cerveau (brain-to-brain interfaces).
Dans ce sens, des chercheurs chinois ont été capables de contrôler le mouvement des blattes (cockroach) en utilisant des signaux du cerveau humain. Actuellement, certains scientifiques aux Etats-Unis ont réussi à connecter le cerveau de plusieurs animaux à la fois, ce qui leur permet de travailler ensemble pour résoudre des problèmes plus complexes. En théorie, on peut imaginer qu’un groupe d’esprits uni peut fournir des solutions que les esprits individuels ne peuvent atteindre seuls.
Dans un avenir lointain, nous pourrions être en mesure de communiquer via un réseau cérébral (Brain-Net), cette recherche est susceptible de contribuer à la connectivité multi-cerveau et au partage de l’information. Par ce procédé, l’armée, par exemple, pourrait un jour diffuser des insectes génétiquement modifiés ou de petits mammifères contrôlés à distance par des signaux du cerveau humain. Ces monstres pourront devenir des dispositifs autonomes comme les drones et pourront être utilisés dans des missions de surveillance, de reconnaissance ou dans des missions d’assassinats.